
Model No: ROB-00388
TK. 374.43
Availability: In stock
Quantity:
Category: Robotics Sensor
Supplier: Techshop Bangladesh
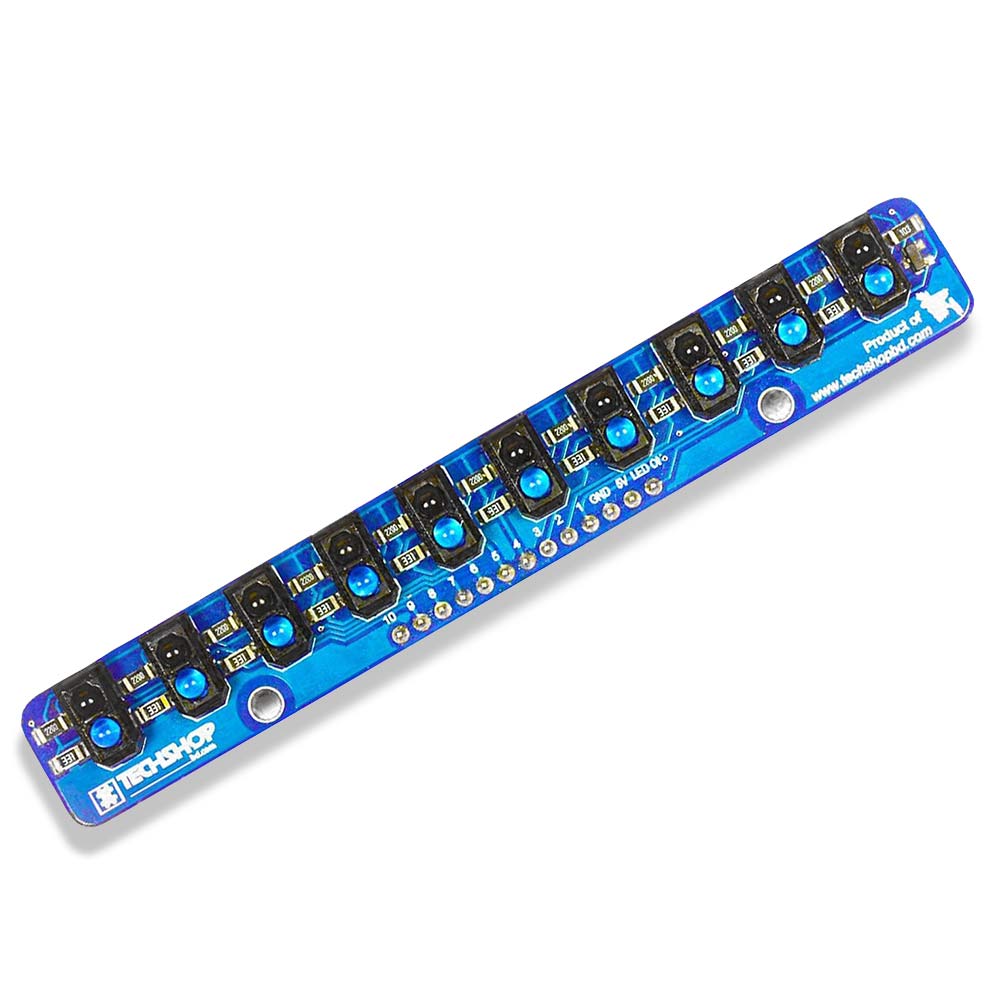
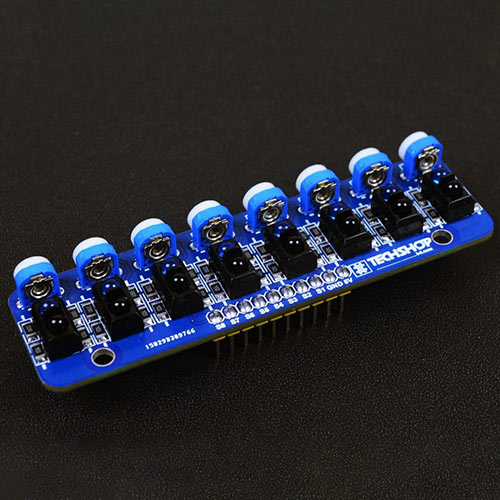
This sensor package is for line following Robot. Eight TCRT5000 reflective optical sensors have been used here.The LM358 dual OPAMP works as a comparator with two reference voltages set by eight POTs.The sensors have 0.4 inch spacing.
You MUST calibrate the sensor before using it. Otherwise it is give wrong data.
Calibration: To calibrate the sensors, you must tune the respective POTs.
1. Attach the sensor to a robot chassis.
2. Connect VCC and GND pins to a 5V power supply like Arduino.
3. Rotate all the potentiometers anti-clockwise to the limit point with a screw driver.
3. put the robot on a line following track keeping all the sensors over white color.
4. Now rotate the potentiometers clockwise untill the respective LED turns off.
5. Don't overturn the potentiometer. Stop rotating clockwise as soon as the corresponding LED turns off.
6. If you overturn the pot by mistake, start from step 3 again.
Doing so will calibrate all the sensors. Now if you put the sensor array over white surface the corresponding LED of a sensor will turn off. Over black surface it will turn ON.

Question & Answer
Total 2 questions
Q: Will it work as analog? Questioned by Shaktam, 27-Feb-2021
No. only digital. You can check our "Analog IR Sensor Array 10" to have analog output. Answered by techshopbd, 28-Feb-2021 09:46 AM
Q: Celebration e je LED off howar kotha bola hoyese. IR led off hoyese bujhbo kivabe? Jehetu eti floor er dike thakbe? Questioned by Shaktam, 28-Feb-2021
Reviews & Ratings
0 Ratings / 0 Reviews
Help: 09678110110
09.00am - 08.00pm (7 days a week)
Pay cash on delivery
Pay cash at your doorstep
Service
All over Bangladesh
Warranty and Replacement
Up to 1 Year