

Model No: ROB-00390
TK. 155.3
Quantity:
Category: Robotics Sensor
Supplier: Techshop Bangladesh
আপনার যদি ইতিপূর্বে Remote Controlled Car টাইপের project নিয়ে কাজ করার অভিজ্ঞতা থেকে থাকে তবে নিশ্চয় পর্যবেক্ষন করে থাকবেন যে, Robot কে Forward বা Backward কমান্ড দেওয়া হয় তখন তার গতি সম্পূর্ণ সরলরেখা বরারবর না হয় বরং একটু ডানে অথবা বামে কিছুটা বেঁকে যায় । এর কারণ হলো দুইটি মোটরের কয়েলের turn সংখ্যা একই হওয়া সত্ত্বেও এদের inductance কখনোই একই হয় না ! আর তাই কয়েলের ভিতর দিয়ে প্রবাহিত কারেন্টও এক হয় না । তাই এদের RPM এর কিছুটা পার্থক্য থেকেই যায়। তাই আপনি চাইলেও কখনোই স্বাভাবিক ভাবে আপনার রোবটের গতি কখনোই সোঁজা রাখতে পারবেন না ।
অপরদিকে যারা maze solving রোবট নিয়ে কাজ করেছেন, তারা পর্যবেক্ষন করে থাকবেন যে, battery charged full থাকা অবস্থায় যদি আপনি রোবটকে program করে দেখেন 200ms delay এর ব্যবধানে আপনার রোবটটি 180 degree ঘুরে আসতে পারে । তাহলে কিছুক্ষন পর যখন battery এর চার্জ কিছুটা কমে যাবে, তখন তার এই rotation angle ও কমে যাবে । অর্থাৎ তখন হয়তো সে 200ms delay এর ব্যবধানে 120 degree বা আরও কম rotate করতেছে । এটা maze solving robot এর জন্য সবচেয়ে বড় অন্তরায় । কারণ এরকম হলে রোবট তার movement track ঠিক রাখতে পারবে না ।
দ্বিতীয় সমস্যার সমাধান কিন্তু খুব সহজেই buck-boost-converter ব্যবহার করে সমাধান করা সম্ভব । কন্তু প্রথম সমস্যা কিন্তু থেকেই যাবে । কারণ দুইটি মোটরের কয়েলের inductance তো আপনি পরিবর্তন করতে পারছেন না !
এসকল কারণে এসব সমস্যার একমাত্র সমাধান হতে পারে এই Motor Encoder । যা আপনার মোটরের RPM গণনা করে প্রতি মূহুর্তে আপনার controller এর কাছে Feedback হিসাবে পাঠিয়ে দিবে । এতে করে আপনার controller বুঝতে পারবে কোন মোটরের গতির পার্থক্য তৈরী হচ্ছে । তখন সে সে মোটরের RPM কে PWM Signal কে কমিয়ে বা বাড়িয়ে অন্যটির সাথে adjust করে নিতে পারবে । এতে করে আপনার robot টি সরলরেখা বরাবর চলতে পারবে ।
অপরদিকে maze solving ক্ষেত্রে বলা যায়, আপনি তো আপনার রোবটের wheel-encoder-এ কতগুলো step রয়েছে এটা নিশ্চয় গণনা করে জেনে নিতে পারবেন । তাই একবার মোটরটি ঘুরে আসতে Encoder কতগুলো step পার করবে সেটা জানা থাকলে, আপনার controller সহজেই বুঝতে পারবে, এদের rotation পূর্ণ হলো কি না । আর এতে করে আপনার বোবটের battery voltage কমে গেলেও সে তার rotational angle step পূর্ণ না হওয়া পর্যন্ত মোটরকে ON ই রাখবে । এতে করে তার rotational angle ঠিকই থাকবে এবং সে তার movement track থেকে সরে যাবে না ।
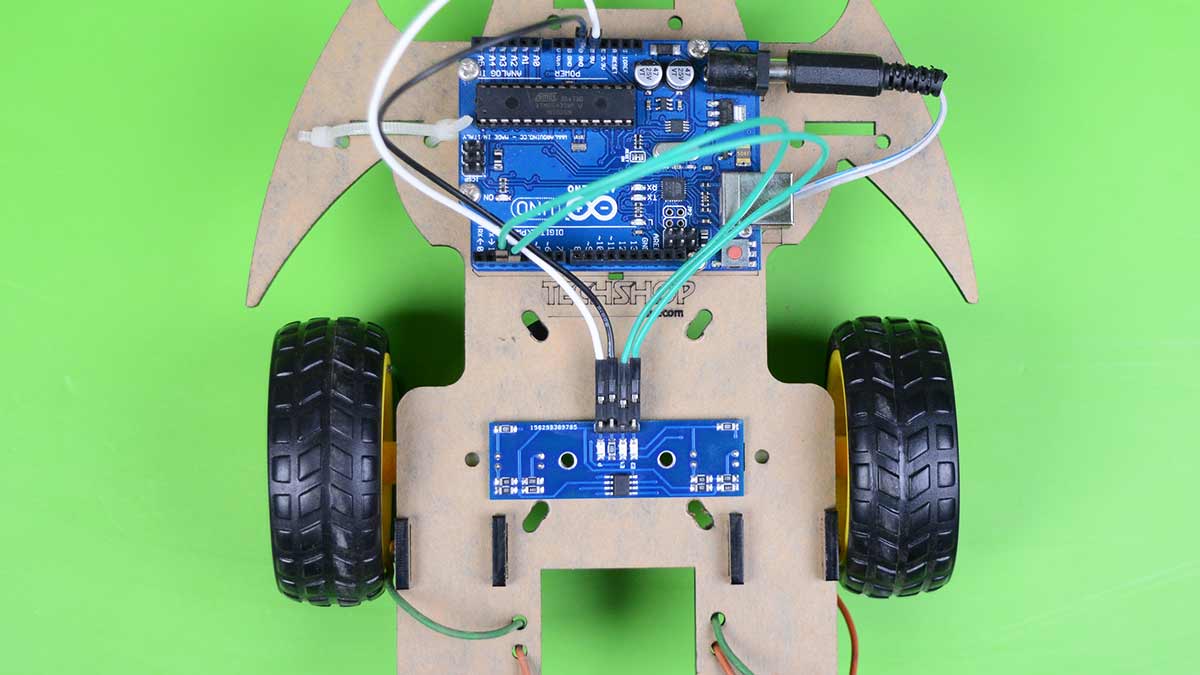
এই Motor Encoder টি TechShop Bangladesh এর নিজেস্ব developed করা Tee01 এবং Hawk01 মডেলের সকল chassis এর সাথে সুন্দর ভাবে fixed হয়ে যাবে । এবং এই একটি Motor Encoder ই দুইটি মোটরের (Left and Right) RPM কাউন্ট করতে সক্ষম ।
Warranty and Replacement:
------------------------------------------
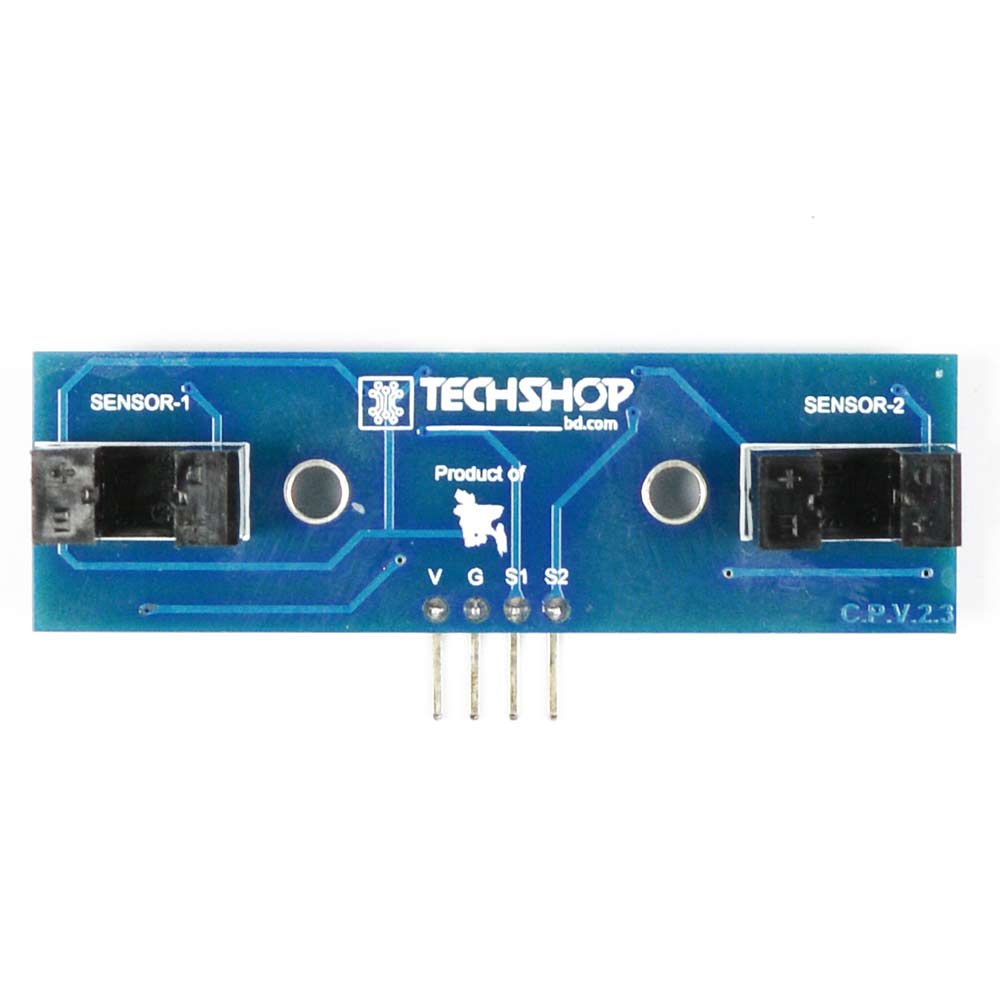
V = VCC = +5V DC
G = GND = 0V DC
S1 = Sensor-1 Digital Output (1/0)
S2 = Sensor-2 Digital Output (1/0)
Question & Answer
Reviews & Ratings
0 Ratings / 0 Reviews
Recently Viewed


Help: 09678110110
09.00am - 08.00pm (7 days a week)
Pay cash on delivery
Pay cash at your doorstep
Service
All over Bangladesh
Warranty and Replacement
Up to 1 Year